









Through a partnership with iSeaMC, Imenco Metas can integrate a robotic ROV or AUV with our subsea asset integrity monitoring stations. The robot design is field-proven with more than ten years of operation in the deepsea.
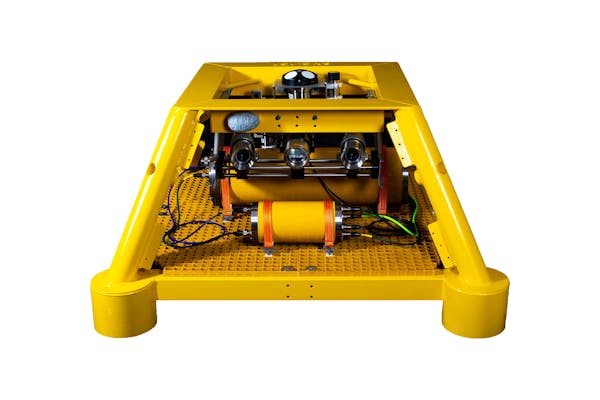
The robotic design is in the form of a crawler or rover with a range of instruments, lights, cameras and manipulators as needed for the mission. It can be controlled remotely live or through pre-programmed operations to travel across the seafloor to monitor the surrounding environment and infrastructure.
The ROV/AUV can be used to monitor the environment for changes, or it can be tasked to investigate a potential leakage site for real-time images and inspection with sophisticated scientific instruments. The crawler can also carry out small tasks, such as operating valves, as long as they are within reach of the manipulator arm.





Get in touch with us or email us at nautronix@imenco.com

If you have invested in a Cathodic Protection System, why not measure and…
If you have invested in a Cathodic Protection System, why not measure and…
X-net® system is a modular sensor deployment and retrieval system for environmental monitoring…
X-net® system is a modular sensor deployment and retrieval system for environmental monitoring…




